■ Masa cuplului motor-angrenaj
● Cutia de viteze și cutia de viteze mijlocie pot fi vândute separat. Introduceți codul care reprezintă tipul cutiei de borne (T) în caseta (□) din numele modelului.
● Introduceți raportul de transmisie în caseta (□) din numele modelului.
● Viteza este calculată prin scufundarea vitezei sincrone a motorului (50Hz : 1500r / min 、 60Hz : 1800r / min) după raportul de transmisie. Viteza reală este cu 2% -20% mai mică decât valoarea deplasată, în funcție de mărimea sarcinii.
● Pentru a reduce viteza dincolo de raportul qear din tabel , atașați o cutie mijlocie mid raportul de transmisie : 10) între reductor și motor. În acest caz, cuplul admis este de 20N.m.
■ Unitate de cuplu admisibilă : Partea superioară (N.m) / Partea inferioară (kgf.cm)
| Tip
Motor / angrenaj | Gear Rato | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 12.5 | 15 | 18 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 |
| Viteză
r / min | 50Hz | 500 | 417 | 300 | 250 | 200 | 166 | 120 | 100 | 83 | 60 | 50 | 42 | 30 | 25 | 20 | 16 | 15 | 12 | 10 | 8 |
| 60Hz | 600 | 500 | 360 | 300 | 240 | 200 | 144 | 120 | 100 | 72 | 60 | 50 | 36 | 30 | 24 | 20 | 18 | 15 | 12 | 10 |
| 5IK40GU-A □
5IK40GU-E □
5IK40GU-C □
5IK40GU-H □
5IK40GU-S □ 5IK40GN-S3 □ | 5GU □ RC
5GU □ RT | Cuplu admisibil | 50Hz | 0.57 | 0.68 | 0.59 | 1.14 | 1.58 | 1.89 | 2.63 | 3.16 | 3.79 | 5.26 | 6.31 | 6.8 | 9.5 | 11.4 | 14.2 | 17.0 | 18.9 | 20.0 | 20.0 | 20.0 |
| 5.80 | 6.96 | 9.66 | 11.6 | 16.1 | 19.3 | 26.8 | 32.2 | 38.6 | 53.7 | 64.4 | 70 | 97 | 116 | 145 | 174 | 193 | 200 | 200 | 200 |
| 60Hz | 0.46 | 0.55 | 0.76 | 0.92 | 1.27 | 1.53 | 2.12 | 2.55 | 3.05 | 4.24 | 5.09 | 5.50 | 7.64 | 9.16 | 11.5 | 13.7 | 15.3 | 18.3 | 20.0 | 20.0 |
| 4.67 | 5.61 | 7.79 | 9.35 | 13.0 | 15.6 | 21.6 | 26.0 | 31.2 | 43.3 | 51.9 | 56.1 | 77.9 | 93.5 | 117 | 140 | 156 | 187 | 200 | 200 |
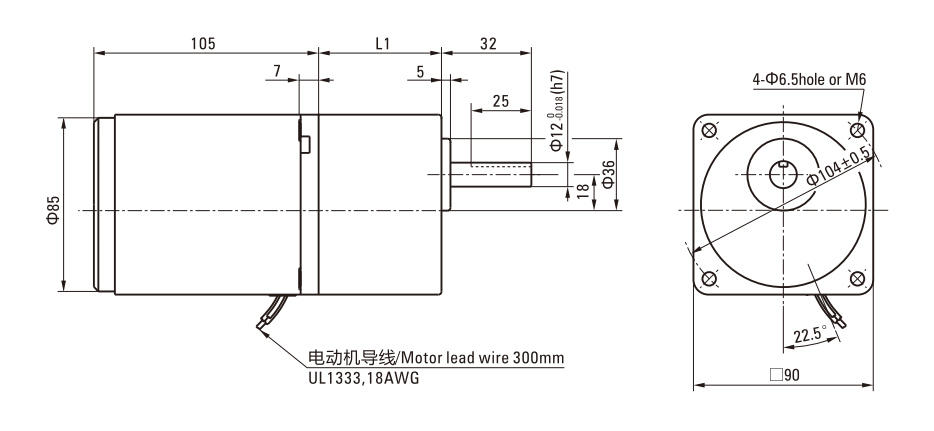
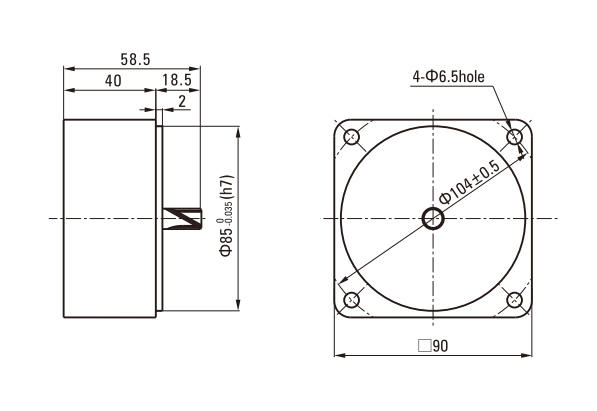
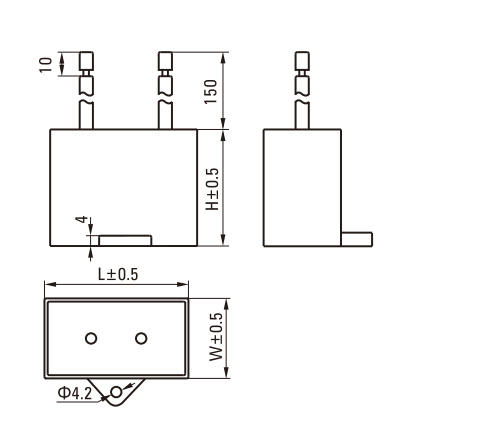
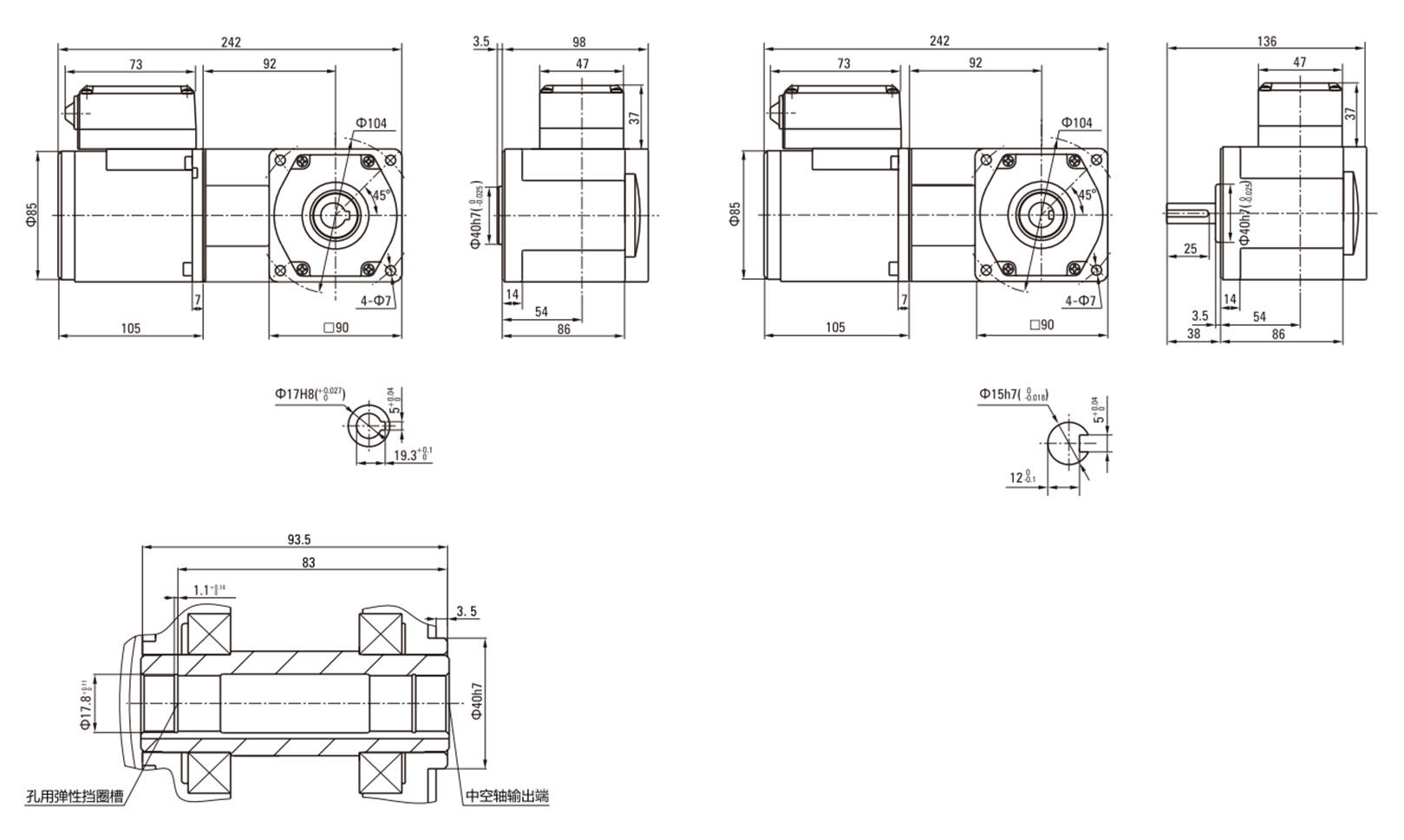
■ Desen tip inducție

■ Masa cuplului motor-angrenaj
Cutia de viteze și cutia de viteze mijlocie pot fi vândute separat. Introduceți codul care reprezintă tipul cutiei de borne terminal T) în caseta (口) din numele modelului.
Introduceți raportul de transmisie în caseta (口) din numele modelului.
Viteza este calculată prin scufundarea vitezei sincrone a motorului (50Hz : 1500r / min 、 60Hz : 1800r / min) după raportul de transmisie. Viteza reală este cu 2% ~ 20% mai mică decât valoarea afișată , în funcție de mărimea încărcăturii.
Pentru a reduce viteza dincolo de raportul de transmisie din tabel, atașați o cutie de viteze medie (raport de transmisie : 10) între reductor și motor. În acest caz, cuplul admis este de 20N.m.
■ Unitate de cuplu admisibilă : Partea superioară (N.m) / Partea inferioară (kgf.cm)
| Tip
Motor / angrenaj | Raport de transmisie | 3 | 3.6 | 5 | 6 | 7.5 | 9 | 12.5 | 15 | 18 | 25 | 30 | 36 | 50 | 60 | 75 | 90 | 100 | 120 | 150 | 180 |
| Viteză
r / min | 50Hz | 500 | 417 | 300 | 250 | 200 | 166 | 120 | 100 | 83 | 60 | 50 | 42 | 30 | 25 | 20 | 16 | 15 | 12 | 10 | 8 |
| 60Hz | 600 | 500 | 360 | 300 | 240 | 200 | 144 | 120 | 100 | 72 | 60 | 50 | 36 | 30 | 24 | 20 | 18 | 15 | 12 | 10 |
| 5IK40GU-A □
5IK40GU-E □
5IK40GU-C □
5IK40GU-H □
5IK40GU-S □ 5IK40GN-S3 □ | 5GU □ RH
5GU □ RA | Admisibil
Cuplu | 50Hz | 0.41 | 0.50 | 0.62 | 0.74 | 0.93 | 1.11 | 1.55 | 1.86 | 2.23 | 3.09 | 3.71 | 4.46 | 6.19 | 7.43 | 9.28 | 11.1 | 12.4 | 14.9 | 18.6 | 20.0 |
| 4.21 | 5.05 | 6.31 | 7.58 | 9.47 | 11.4 | 15.8 | 18.9 | 22.7 | 31.6 | 37.9 | 45.5 | 63.1 | 75.8 | 94.7 | 114 | 126 | 152 | 189 | 200 |
| 60Hz | 0.33 | 0.40 | 0.50 | 0.60 | 0.75 | 0.90 | 1.25 | 1.50 | 1.80 | 2.50 | 2.99 | 3.59 | 4.99 | 5.99 | 7.49 | 8.98 | 9.98 | 12.0 | 15.0 | 18.0 |
| 3.39 | 4.07 | 5.09 | 6.11 | 7.64 | 9.17 | 12.7 | 15.3 | 18.3 | 25.5 | 30.6 | 36.7 | 50.9 | 61.1 | 76.4 | 91.7 | 102 | 122 | 153 | 183 |
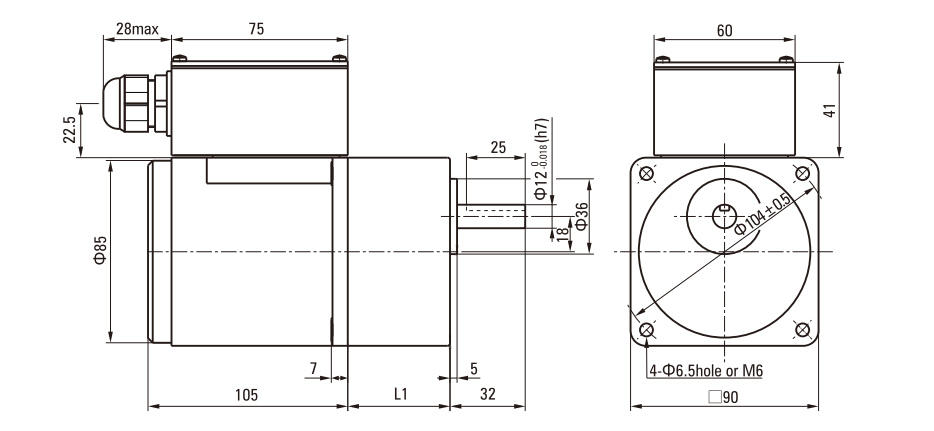
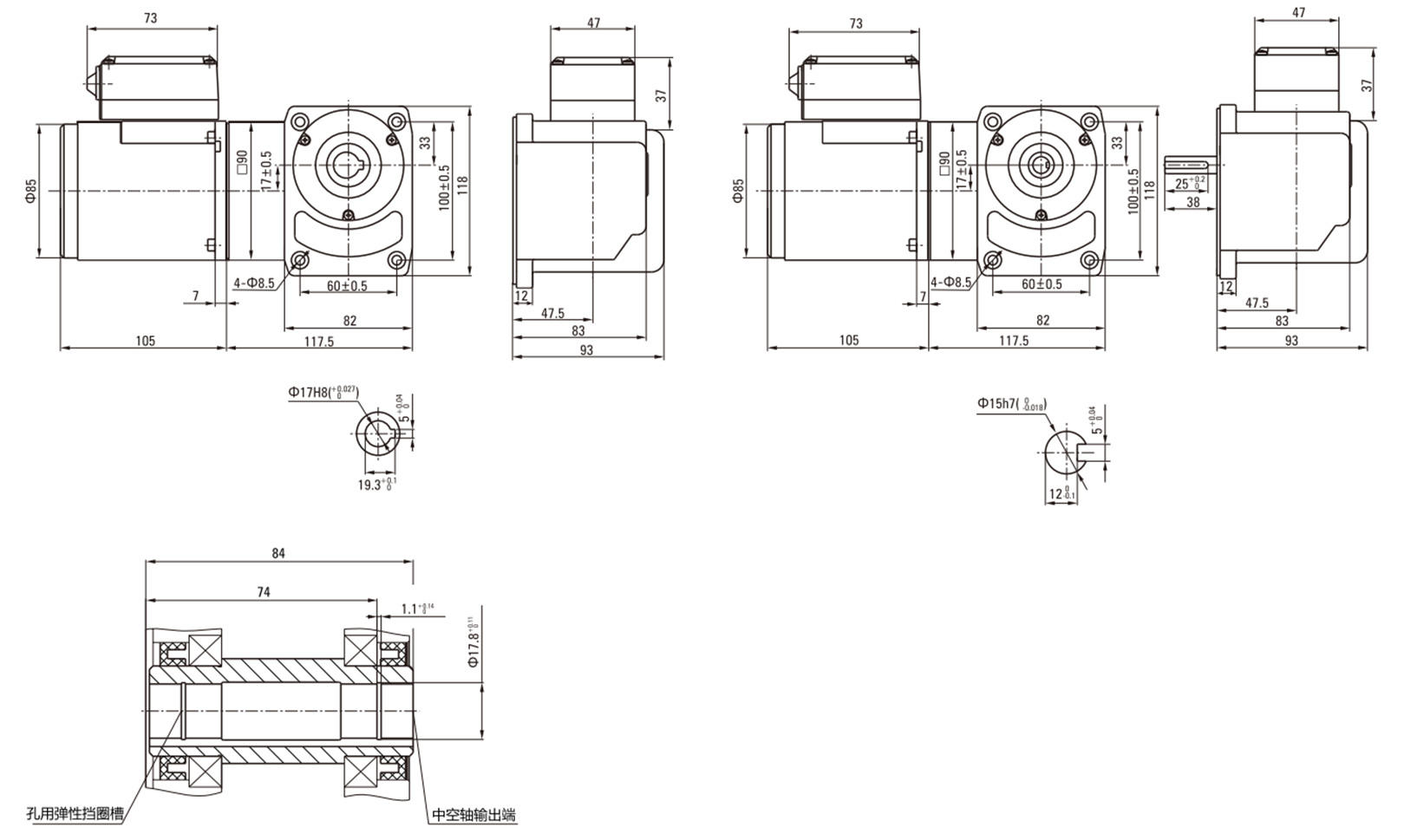
■ Desen tip inducție

■ Schema de cablare
● Direcția de rotație a motorului este vizualizată de la capătul arborelui motorului. CW reprezintă direcția în sensul acelor de ceasornic, în timp ce CCW reprezintă direcția în sens invers acelor de ceasornic.
● Denumirea indicată în listă este de tip arbore pinion, valabilă și pentru tipul echivalent de arbore rotund.
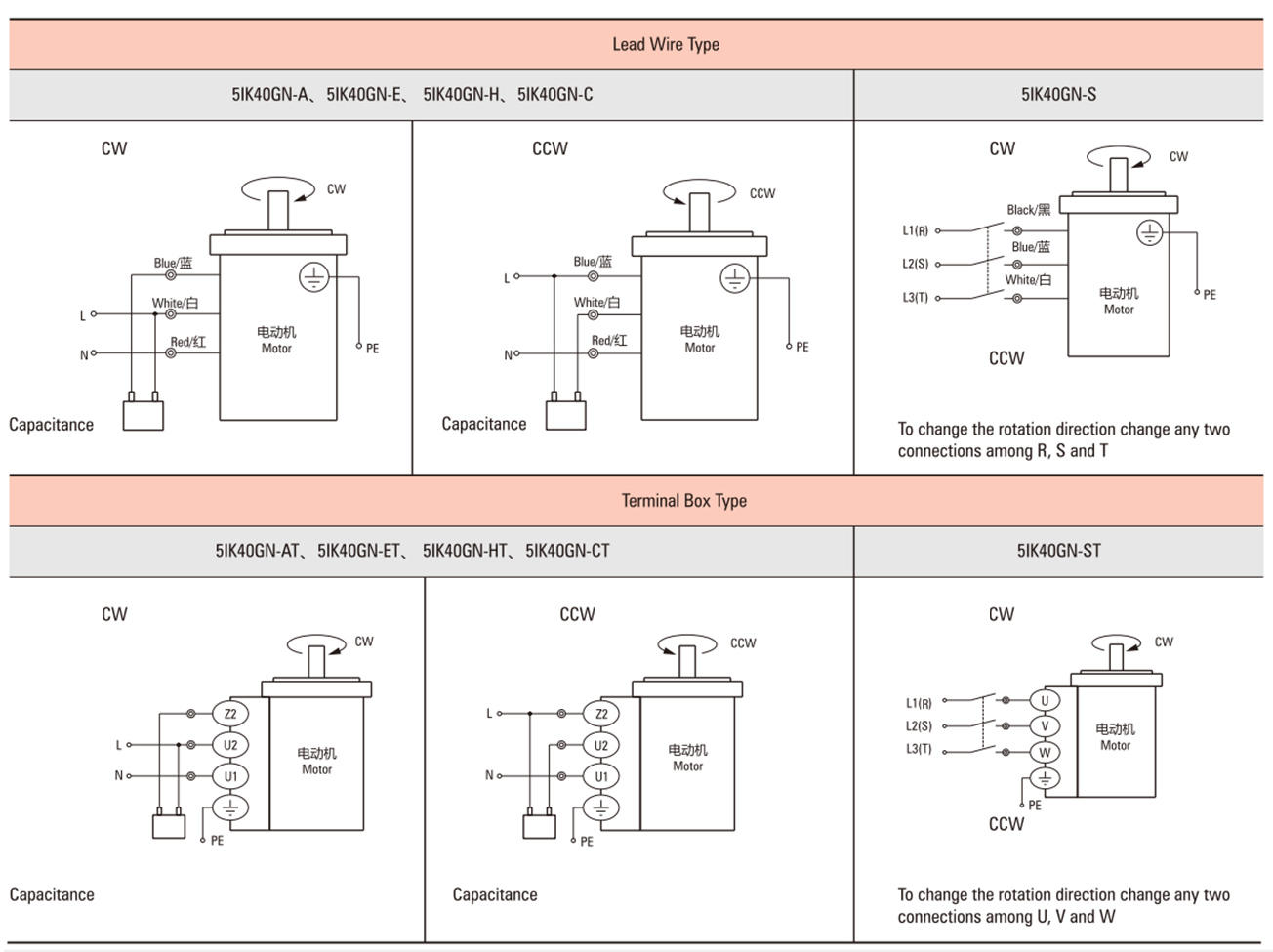
Notă:
Schimbați direcția de rotație a motorului monofazat numai după ce opriți motorul.
Dacă se încearcă schimbarea direcției de rotație în timp ce motorul se rotește, motorul poate ignora comanda de mers înapoi sau își poate schimba direcția de rotație după o anumită întârziere.
 Română
Română